On Thu, Jun 5, 2014 at 3:50 PM, AFISH <address@hidden> wrote:
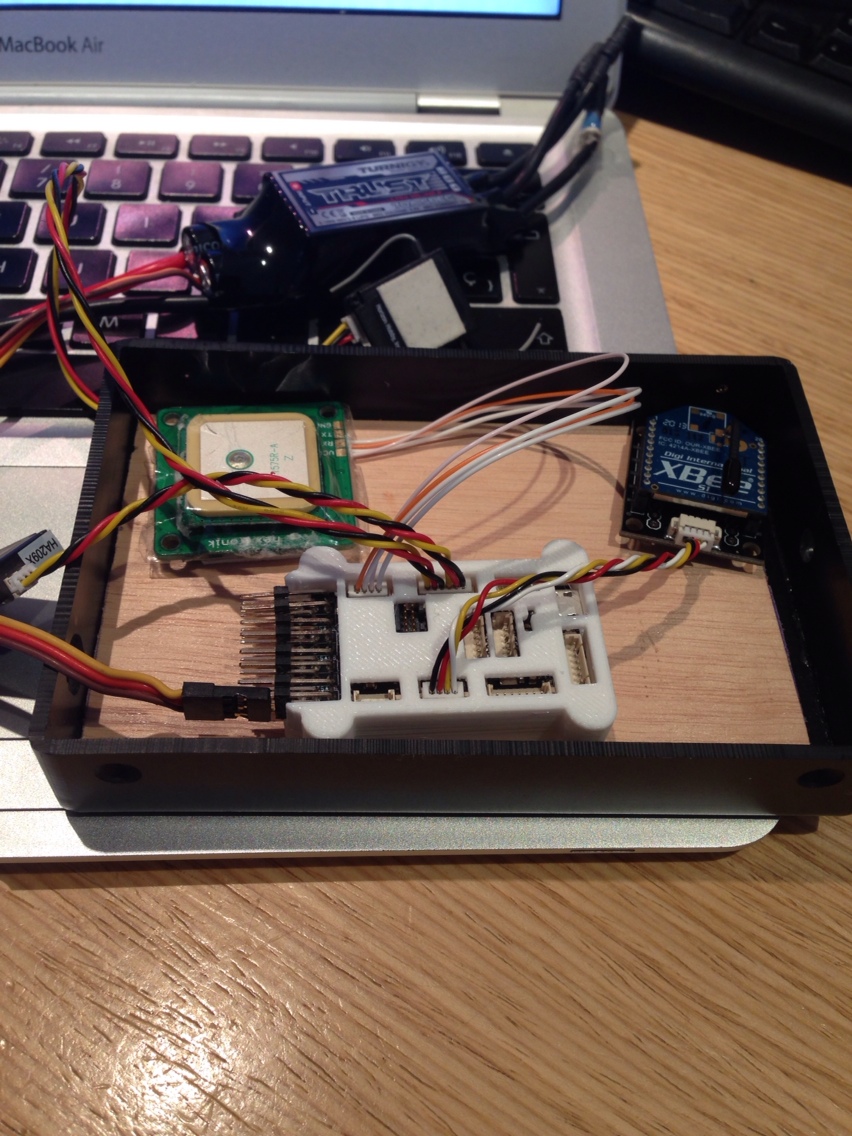
Hi LoicI use a 3d printed case protect Lisa board. And there is no light get to the back side of the Lisa board where asiprit 2.2 IMU mounted.—
Sent from Mailbox for iPhoneOn Thu, Jun 5, 2014 at 5:23 AM, Loic Drumettaz <address@hidden> wrote:
LoïcRegardsHi,Please check that your baro is well protected from light. Baros are sensitive to light.2014-06-05 9:17 GMT+02:00 afishindouban <address@hidden>:Hi Felix
As you mention below, Also I check the branch master sample Microjet_lisaM,
that configuration is same as your description.
So I just build and flash to my transition robotic Lisa/M2 AP. and the GCS
ALT number getting crazy. So I turn on RAW_SENSOR, I found baro_raw is not
stable at all. some time has peak value absolutely high. this should be the
reason of my ALT number get crazy? what could be the reason of that? I show
you the plotter of that to you.
<http://lists.paparazziuav.org/file/n15618/53.png>
Thank you so much
Kevin.
flixr wrote> Hi,--
>
> just
> <configure name="LISA_M_BARO" value="BARO_MS5611_SPI"/>
> is enough.
> <define name="USE_BAROMETER" value="TRUE"/>
> is only needed if you want to
> use for altitude estimation in
> <subsystem name="ins" type="alt_float"/>
> .
> <configure name="USE_BARO_BOARD" value="TRUE"/>
> is not really needed (since
> TRUE by default on boards like Lisa/M that have a baro).
> Remove
> <define name="USE_SPI_SLAVE3"/>
> and the baro modules.
>
> Cheers, Felix
View this message in context: http://lists.paparazziuav.org/Critical-behaviour-of-baro-ms5611-i2c-tp11592p15618.html
Sent from the paparazzi-devel mailing list archive at Nabble.com.
_______________________________________________
Paparazzi-devel mailing list
address@hidden
https://lists.nongnu.org/mailman/listinfo/paparazzi-devel
_______________________________________________
Paparazzi-devel mailing list
address@hidden
https://lists.nongnu.org/mailman/listinfo/paparazzi-devel