have you balanced all propellers?
Have you made the wiring of the DC and motor wires so, that there is not opening a space?
If you have a power switch you have to twist the plus and ground wire to get a small open space and wire both lines to to switch.
Please fix the multikopter to ground and look to the magnetometer measurements, that there is no influence of the current with different throttle values.
Please look to the rate values.
Please look to the accelometer values.
Same other multikopter projects keep the magnetometer about 10 cm away from every power wire.
good luck
Heinrich
Bruzzlee schrieb:
Hi Loic
Thx for the hint.
Today I did the calibration outside. (without mobile phone and any disturbing elements in the near)
It looks better now, but sometimes I still have a small drift.
Because of the drift, the Quadrotor wants to correct its position and spins up two rotors, even if I take the throttle back to zero again. Then I have to use the kill switch... (The first time it "jumped" into a wall become of it ;-) )
Maybe I have to tune the AHRS parameters... Any suggestions?
By the way, is there a simply way to deactivate the magnetometer on the Aspirin? (online)
The r Bias is now -203 with those values:
<define name="MAG_X_NEUTRAL" value="-86"/>
<define name="MAG_Y_NEUTRAL" value="97"/>
<define name="MAG_Z_NEUTRAL" value="118"/>
<define name="MAG_X_SENS" value="3.87312124485" integer="16"/>
<define name="MAG_Y_SENS" value="3.87403131201" integer="16"/>
<define name="MAG_Z_SENS" value="4.38017435132" integer="16"/>
Thank you
Bruzzlee
On 01.04.14 08:46, Loic Drumettaz wrote:
Hi,
Mag calibration should be perfomed outside, far away from any metallic material (cars, watch, belt, ...)
The gyro bias can be measured with gyro scaled mean value when not moving.
This value should be always equal to the bias estimated by the AHRS filter. Otherwise, it means that the gyro and mag measurements don't agree.
In most case this is due to a bad mag calibration.
Regards
LoicLe 31 mars 2014 20:46, "Bruzzlee" <address@hidden> a écrit :
Hi Heinrich and Alonso
Today I did the calibration about 30 times. (on different places)
Now I have calibration which I think I can work with.
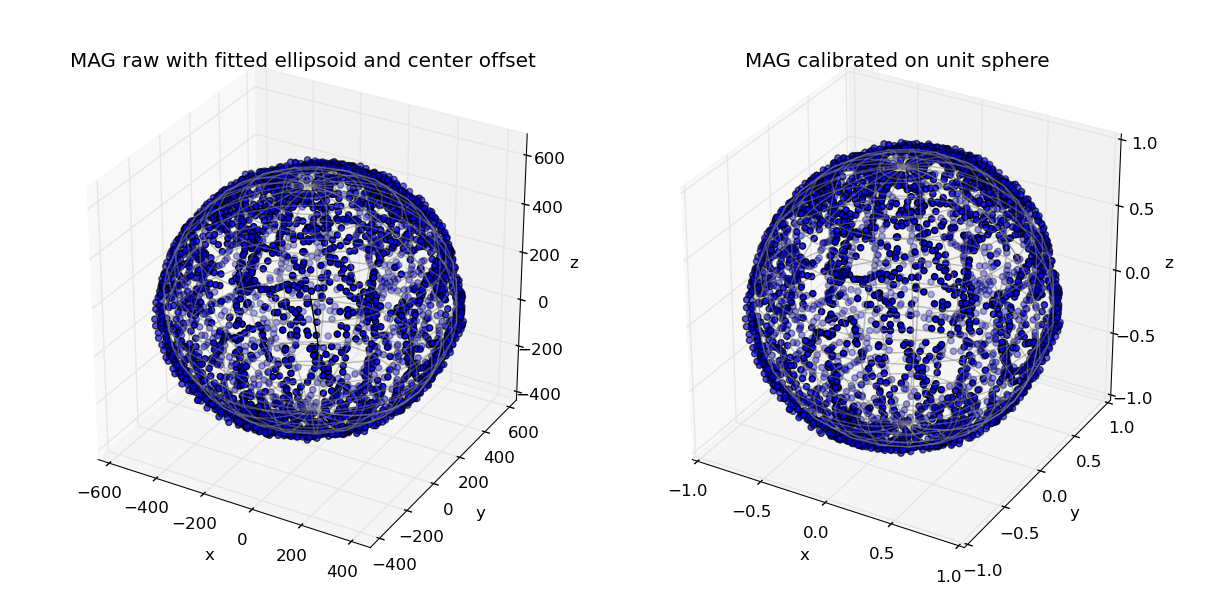
Even the globe was not fully surrounded with measurement dots. (calibration graphic)
The phi and the bias is now almost stable.
biases:
p: -258 -3.61°/s
q: 9 0.125°/s
r: -160 -2.238°/s
Those values are all out of your range but I think it will work anyway, don't you?
Thank you for you hints
Bruzzlee
On 31.03.14 09:58, Prof. Dr.-Ing. Heinrich Warmers wrote:
Hi,
can you calculate the bias in °/s?
I have found that a bias in the range of 0.5-2°/s is normal.
If the bias brake this border change the sensor element.
regards
Heinrich
Bruzzlee schrieb:
Hello paparazzi community
After 8h of trying to get rid of my drift on phi you are my last hope.
Every hint is useful!
I think it has something to do with the AHRS.
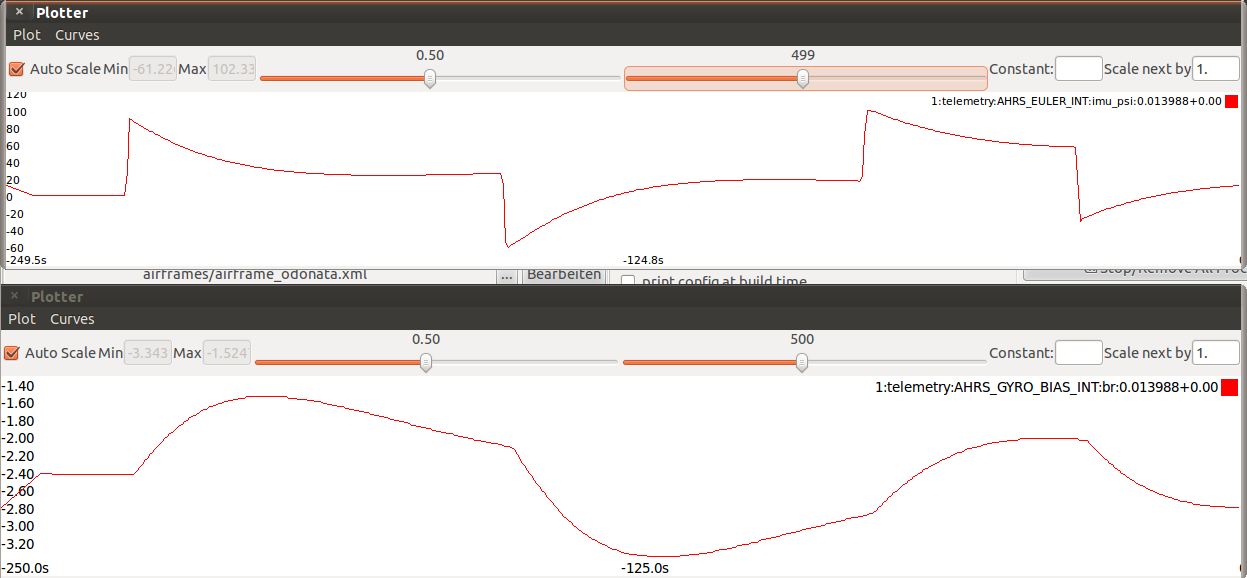
Compensation of psi drift with MAG
The plot shows a fast 90° turn clockwise and back again.
In the lower plot you also can that the bias changes a lot, is that "normal"?
Lisa M 1.0 + Aspirin IMU 1.5
(I did the calibration of Accel and mag a few time with similar results)
Thx for any hint!
Bruzzlee
<airframe name="Odonata_LisaM"> <firmware name="rotorcraft"> <target name="ap" board="lisa_m_1.0"> <subsystem name="radio_control" type="spektrum"> <!--define name="RADIO_CONTROL_SPEKTRUM_SIGNS" value="\{1,1,-1,1,-1,-1\}"/--> <define name="RADIO_MODE" value="RADIO_GEAR"/> <define name="RADIO_KILL_SWITCH" value="RADIO_AUX1"/> <configure name="USE_SECONDARY_SPEKTRUM_RECEIVER" value="0"/> <configure name="USE_KILL_SWITCH_FOR_MOTOR_ARMING" value="1"/> <!--configure name="AUTOPILOT_DISABLE_AHRS_KILL" value="0"/--> </subsystem> </target> <target name="nps" board="pc"> <subsystem name="fdm" type="jsbsim"/> <subsystem name="radio_control" type="ppm"/> </target> <subsystem name="motor_mixing"/> <subsystem name="actuators" type="pwm"> <define name="SERVO_HZ" value="400"/> <!--define name="USE_SERVOS_7AND8"/--> </subsystem> <subsystem name="telemetry" type="transparent"/> <configure name="MODEM_BAUD" value="B9600"/> <subsystem name="imu" type="aspirin_v1.5"/> <subsystem name="gps" type="ublox"/> <subsystem name="stabilization" type="int_quat"/> <subsystem name="ahrs" type="int_cmpl_quat"/> <subsystem name="ins"/> <!--define name="USE_INS_NAV_INIT"/--> <!--subsystem name="stabilization" type="int_euler"/> <subsystem name="ahrs" type="int_cmpl_euler"/--> </firmware> <firmware name="lisa_test_progs"> <target name="test_led" board="lisa_m_1.0"> <configure name="SYS_TIME_LED" value="none"/> </target> <target name="test_uart" board="lisa_m_1.0"/> <target name="test_imu_aspirin" board="lisa_m_1.0"/> <target name="test_rc_spektrum" board="lisa_m_1.0"/> <target name="test_baro" board="lisa_m_1.0"/> </firmware> <servos driver="Pwm"> <servo name="FRONT" no="0" min="1000" neutral="1100" max="1900"/> <servo name="BACK" no="1" min="1000" neutral="1100" max="1900"/> <servo name="RIGHT" no="2" min="1000" neutral="1100" max="1900"/> <servo name="LEFT" no="3" min="1000" neutral="1100" max="1900"/> </servos> <commands> <axis name="ROLL" failsafe_value="0"/> <axis name="PITCH" failsafe_value="0"/> <axis name="YAW" failsafe_value="0"/> <axis name="THRUST" failsafe_value="0"/> </commands> <command_laws> <call fun="motor_mixing_run(autopilot_motors_on,FALSE,values)"/> <set servo="FRONT" value="motor_mixing.commands[SERVO_FRONT]"/> <set servo="BACK" value="motor_mixing.commands[SERVO_BACK]"/> <set servo="RIGHT" value="motor_mixing.commands[SERVO_RIGHT]"/> <set servo="LEFT" value="motor_mixing.commands[SERVO_LEFT]"/> </command_laws> <section name="MIXING" prefix="MOTOR_MIXING_"> <define name="STOP_MOTOR" value="0"/> <define name="TRIM_ROLL" value="0"/> <define name="TRIM_PITCH" value="0"/> <define name="TRIM_YAW" value="0"/> <define name="NB_MOTOR" value="4"/> <define name="SCALE" value="256"/> <!--define name="ROLL_COEF" value="{ 0, -256, 0, 256 }"/> <define name="PITCH_COEF" value="{ 256, 0, -256, 0 }"/> <define name="YAW_COEF" value="{ -256, 256, -256, 256 }"/> <define name="THRUST_COEF" value="{ 256, 256, 256, 256 }"/--> <define name="ROLL_COEF" value="{ 0 , 0, -256, 256 }"/> <define name="PITCH_COEF" value="{ 256, -256, 0, 0 }"/> <define name="YAW_COEF" value="{ 256, 256, -256, -256 }"/> <define name="THRUST_COEF" value="{ 256, 256, 256, 256 }"/> </section> <section name="IMU" prefix="IMU_"> <!--define name="GYRO_P_NEUTRAL" value="-60"/> <define name="GYRO_Q_NEUTRAL" value="1"/> <define name="GYRO_R_NEUTRAL" value="-40"/--> <!--define name="GYRO_P_SENS" value="4.359" integer="16"/> <define name="GYRO_Q_SENS" value="4.359" integer="16"/> <define name="GYRO_R_SENS" value="4.359" integer="16"/--> <!--define name="GYRO_P_SENS" value="4.967" integer="16"/> <define name="GYRO_Q_SENS" value="4.967" integer="16"/> <define name="GYRO_R_SENS" value="8.967" integer="16"/> <define name="GYRO_PQ_SENS" value="0.0" integer="16"/> <define name="GYRO_PR_SENS" value="0.0" integer="16"/> <define name="GYRO_QR_SENS" value="0.0" integer="16"/--> <define name="ACCEL_X_NEUTRAL" value="2"/> <define name="ACCEL_Y_NEUTRAL" value="-2"/> <define name="ACCEL_Z_NEUTRAL" value="-18"/> <define name="ACCEL_X_SENS" value="38.364291532" integer="16"/> <define name="ACCEL_Y_SENS" value="37.412848171" integer="16"/> <define name="ACCEL_Z_SENS" value="39.5532801506" integer="16"/> <!--define name="ACCEL_XY_SENS" value="0.0" integer="16"/> <define name="ACCEL_XZ_SENS" value="0.0" integer="16"/> <define name="ACCEL_YZ_SENS" value="0.0" integer="16"/--> <define name="MAG_X_NEUTRAL" value="-101"/> <define name="MAG_Y_NEUTRAL" value="32"/> <define name="MAG_Z_NEUTRAL" value="-42"/> <define name="MAG_X_SENS" value="4.04547589416" integer="16"/> <define name="MAG_Y_SENS" value="4.57546806101" integer="16"/> <define name="MAG_Z_SENS" value="4.01214304094" integer="16"/> <!--define name="MAG_XY_SENS" value="0.0" integer="16"/> <define name="MAG_XZ_SENS" value="0.0" integer="16"/> <define name="MAG_YZ_SENS" value="0.0" integer="16"/--> <define name="BODY_TO_IMU_PHI" value="0." unit="deg"/> <define name="BODY_TO_IMU_THETA" value="0." unit="deg"/> <define name="BODY_TO_IMU_PSI" value="90." unit="deg"/> </section> <section name="AUTOPILOT"> <define name="MODE_MANUAL" value="AP_MODE_ATTITUDE_DIRECT"/> <define name="MODE_AUTO1" value="AP_MODE_ATTITUDE_Z_HOLD"/> <define name="MODE_AUTO2" value="AP_MODE_HOVER_Z_HOLD"/> </section> <section name="BAT"> <define name="CATASTROPHIC_BAT_LEVEL" value="9.3" unit="V"/> </section> <section name="STABILIZATION_RATE" prefix="STABILIZATION_RATE_"> <!-- setpoints --> <define name="SP_MAX_P" value="10000"/> <define name="SP_MAX_Q" value="10000"/> <define name="SP_MAX_R" value="10000"/> <define name="DEADBAND_P" value="20"/> <define name="DEADBAND_Q" value="20"/> <define name="DEADBAND_R" value="200"/> <define name="REF_TAU" value="4"/> <!-- feedback --> <define name="GAIN_P" value="400"/> <define name="GAIN_Q" value="400"/> <define name="GAIN_R" value="350"/> <define name="IGAIN_P" value="75"/> <define name="IGAIN_Q" value="75"/> <define name="IGAIN_R" value="50"/> <!-- feedforward --> <define name="DDGAIN_P" value="300"/> <define name="DDGAIN_Q" value="300"/> <define name="DDGAIN_R" value="300"/> </section> <section name="STABILIZATION_ATTITUDE" prefix="STABILIZATION_ATTITUDE_"> <!-- setpoints --> <define name="SP_MAX_PHI" value="45." unit="deg"/> <define name="SP_MAX_THETA" value="45." unit="deg"/> <define name="SP_MAX_PSI" value="45." unit="deg"/> <define name="SP_MAX_R" value="90." unit="deg/s"/> <define name="SP_MAX_P" value="90." unit="deg/s"/> <define name="DEADBAND_E" value="0"/> <define name="DEADBAND_A" value="250"/> <define name="DEADBAND_R" value="250"/> <!-- reference --> <define name="REF_OMEGA_P" value="800" unit="deg/s"/> <define name="REF_ZETA_P" value="0.85"/> <define name="REF_MAX_P" value="400." unit="deg/s"/> <define name="REF_MAX_PDOT" value="RadOfDeg(8000.)"/> <define name="REF_OMEGA_Q" value="800" unit="deg/s"/> <define name="REF_ZETA_Q" value="0.85"/> <define name="REF_MAX_Q" value="400." unit="deg/s"/> <define name="REF_MAX_QDOT" value="RadOfDeg(8000.)"/> <define name="REF_OMEGA_R" value="500" unit="deg/s"/> <define name="REF_ZETA_R" value="0.85"/> <define name="REF_MAX_R" value="180." unit="deg/s"/> <define name="REF_MAX_RDOT" value="RadOfDeg(1800.)"/> <!-- feedback --> <define name="PHI_PGAIN" value="750"/> <define name="PHI_DGAIN" value="500"/> <define name="PHI_IGAIN" value="100"/> <define name="THETA_PGAIN" value="750"/> <define name="THETA_DGAIN" value="500"/> <define name="THETA_IGAIN" value="100"/> <define name="PSI_PGAIN" value="1500"/> <define name="PSI_DGAIN" value="1000"/> <define name="PSI_IGAIN" value="10"/> <!-- feedforward --> <define name="PHI_DDGAIN" value=" 150"/> <define name="THETA_DDGAIN" value=" 150"/> <define name="PSI_DDGAIN" value=" 300"/> </section> <section name="INS" prefix="INS_"> </section> <section name="GUIDANCE_V" prefix="GUIDANCE_V_"> <define name="MIN_ERR_Z" value="POS_BFP_OF_REAL(-10.)"/> <define name="MAX_ERR_Z" value="POS_BFP_OF_REAL( 10.)"/> <define name="MIN_ERR_ZD" value="SPEED_BFP_OF_REAL(-10.)"/> <define name="MAX_ERR_ZD" value="SPEED_BFP_OF_REAL( 10.)"/> <define name="MAX_SUM_ERR" value="2000000"/> <define name="HOVER_KP" value="400"/> <define name="HOVER_KD" value="350"/> <define name="HOVER_KI" value="144"/> <define name="GUIDANCE_V_NOMINAL_HOVER_THROTTLE" value ="0.9"/> </section> <section name="AHRS" prefix="AHRS_"> <define name="H_X" value=" 0.03075352"/> <define name="H_Y" value=" 0.99765715"/> <define name="H_Z" value=" 0.06111"/> <!--define name="H_X" value=" 0.460452"/> <define name="H_Y" value=" 0.0031046"/> <define name="H_Z" value=" 0.8876792"/--> </section> <section name="GUIDANCE_H" prefix="GUIDANCE_H_"> <define name="PGAIN" value="50"/> <define name="DGAIN" value="50"/> <define name="IGAIN" value="0"/> </section> <section name="MISC"> <define name="FACE_REINJ_1" value="1024"/> </section> <section name="SIMULATOR" prefix="NPS_"> <define name="ACTUATOR_NAMES" value="{"front_motor", "back_motor", "right_motor", "left_motor"}"/> <define name="JSBSIM_INIT" value=""reset00""/> <define name="SENSORS_PARAMS" value=""nps_sensors_params_booz2_a1.h""/> <!-- mode switch on joystick channel 5 (axis numbering starting at zero) --> <define name="JS_AXIS_MODE" value="4"/> </section> <!--modules main_freq="512"> <!--load name="vehicle_interface_overo_link.xml"/-> <load name="gps_ubx_ucenter.xml"/> </modules--> </airframe>
_______________________________________________ Paparazzi-devel mailing list address@hidden https://lists.nongnu.org/mailman/listinfo/paparazzi-devel
_______________________________________________ Paparazzi-devel mailing list address@hidden https://lists.nongnu.org/mailman/listinfo/paparazzi-devel
_______________________________________________
Paparazzi-devel mailing list
address@hidden
https://lists.nongnu.org/mailman/listinfo/paparazzi-devel
_______________________________________________ Paparazzi-devel mailing list address@hidden https://lists.nongnu.org/mailman/listinfo/paparazzi-devel
_______________________________________________ Paparazzi-devel mailing list address@hidden https://lists.nongnu.org/mailman/listinfo/paparazzi-devel