Le 20 février 2012 09:50, Loic Drumettaz <address@hidden> a écrit :
Hello,
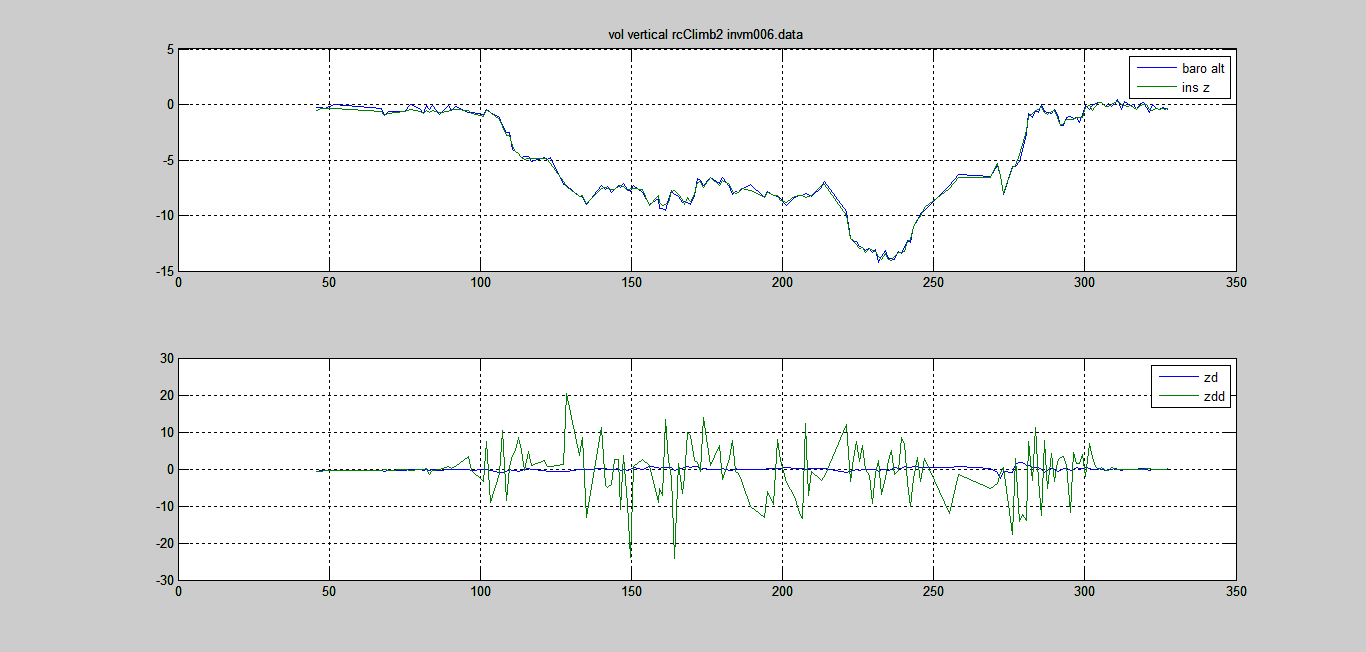
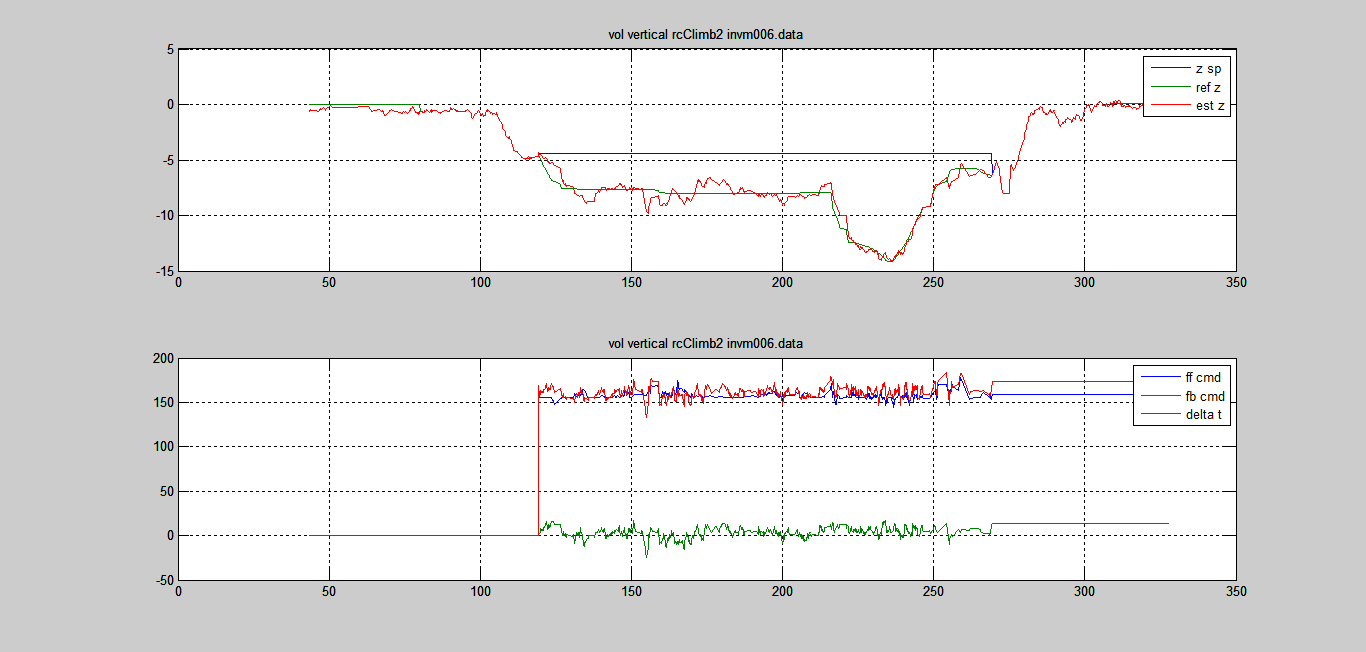
I made some modifications on my quad to reduce vibrations on the IMU. Motor+propellers were balanced by rotating the propeller: there is an optimal mounting angle of the propeller on the motor where the vibration is minimal. The imu was mounted on rubber screws as your suggestion.These modification reduced vibration to an acceptable level since i've been able to fly in RC_CLIMB mode. The vertical speed ins_zd is now OK. But There are still quite important oscillations on the vertical accelerations:This zdd oscillations is perturbating the feedforward term of the vertical control loop (see blue curve below):
So, the problem i had is now solved but there is still some room for improvement...ThanksLoïc
Hi,
i think the Rate sensor signals are ok. Please replay the test if you hold you quadocpter in the hand and
use a throttle that the quadcopter is just hover. The Idea with a additional mass may be help.
What is the problem with the values? Is the system flying well and only the values are to noisy?
Heinrich