Hi,
@Eduardo: Why didn't you also use the neutrals you get from the
calibration? Should be better than trying to take the correct neutrals
"by hand" from the messages (e.g. the axes might not be 100% aligned
with the gravity vector).
@Bruzzlee: You already get a warning and the sens values are totally
different. It can't work properly, as you didn't move the imu. You
have to take measurements with the imu "turned on all sides" at least
once. http://paparazzi.enac.fr/wiki/ImuCalibration#How_to_use_it
Cheers, Felix
On Fri, Jan 27, 2012 at 3:32 PM, Bruzzlee<address@hidden> wrote:
He all
thx 4 the answer
Stupid question to LisaM: Has the Aspirin to be upside or downside? ;-) The
sign of the Z-Axis on the Aspirin shows a circle with a dot, so I was
guessing that the IMU should be on top.
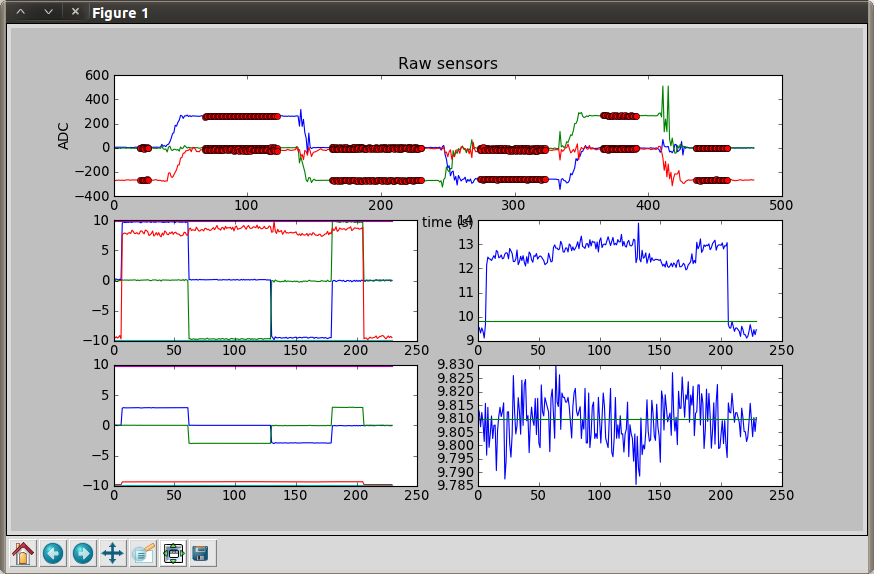
I managed to get my RAW datas by using the normal AP firmware and changing
the telemetry mode in the GCS Settings to RAW.
I got some values out of the script. See attachment.
The PFD is still rotating.....
Terminal output:
./calibrate.py -i 1 -s ACCEL
'/home/bruzzlee/Paparazzi/paparazzi_odonata/var/logs/12_01_27__15_14_37.data'
initial guess : avg 7.19678733577 std 2.2245311935
/usr/lib/python2.7/dist-packages/scipy/optimize/minpack.py:318:
RuntimeWarning: Number of calls to function has reached maxfev = 1400.
warnings.warn(errors[info][0], RuntimeWarning)
optimized guess : avg 9.80925677574 std 0.00967142874765
<define name="ACCEL_X_NEUTRAL" value="-935"/>
<define name="ACCEL_Y_NEUTRAL" value="-851"/>
<define name="ACCEL_Z_NEUTRAL" value="-267"/>
<define name="ACCEL_X_SENS" value="8.13419611628" integer="16"/>
<define name="ACCEL_Y_SENS" value="7.73102782993" integer="16"/>
<define name="ACCEL_Z_SENS" value="29.0050445772" integer="16"/>
On Fri Jan 27 14:58:08 2012, Christoph Niemann wrote:
Hi,
I got my File. But an idea: Perhaps the test program doesn't support
the xbee api? Or is it transparent? If it is using the api i would
suggest to connect directly to the UART.
Good luck
Christoph
2012/1/27 Bruzzlee<address@hidden<mailto:address@hidden>>
Hi all
Has anyone successfully created a Aspirin IMU calibration file
according to this tutorial?
http://paparazzi.enac.fr/wiki/__ImuCalibration
<http://paparazzi.enac.fr/wiki/ImuCalibration>
I've never received the calibration file from jobyrobotics so I
tried to create my own.
I tried "test_imu_aspirin" on lisa_m_1.0 board but then the Xbee
gets no data.
Any hint?
Thx Bruzzlee
_________________________________________________
Paparazzi-devel mailing list
address@hidden<mailto:address@hidden>
https://lists.nongnu.org/__mailman/listinfo/paparazzi-__devel
<https://lists.nongnu.org/mailman/listinfo/paparazzi-devel>
_______________________________________________
Paparazzi-devel mailing list
address@hidden
https://lists.nongnu.org/mailman/listinfo/paparazzi-devel
_______________________________________________
Paparazzi-devel mailing list
address@hidden
https://lists.nongnu.org/mailman/listinfo/paparazzi-devel
_______________________________________________
Paparazzi-devel mailing list
address@hidden
https://lists.nongnu.org/mailman/listinfo/paparazzi-devel
{kind=link}