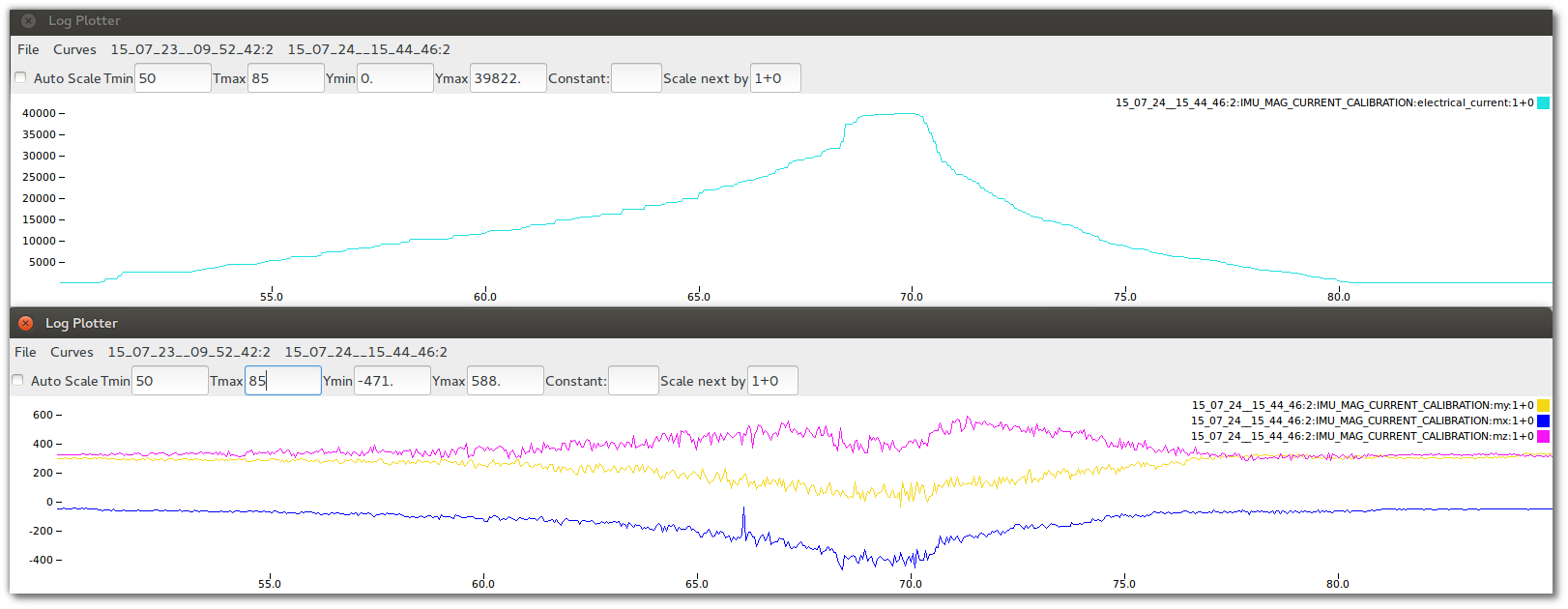
I performed a new current calibration:
Before:
Roughly 10° still. Is that good enough or would you recommend to try to make it better?
In the next couple of days I will test if it helped with my original problem. The flying space today wasn't wide enough to switch into hover mode for more than a second.
Simon
Am 24.07.2015 um 13:16 schrieb Simon Liebold:
Before:
Question: Is this a lot? ^^^And after (copter held stationary on the ground):
Roughly 10° still. Is that good enough or would you recommend to try to make it better?
In the next couple of days I will test if it helped with my original problem. The flying space today wasn't wide enough to switch into hover mode for more than a second.
Simon
Am 24.07.2015 um 13:16 schrieb Simon Liebold:
Hi,
The power distribution board is about 2cm underneath the magnetometer. The (1.5mm²) wires leading to the motors are placed in the 14mm carbon tubes with not a lot of space between the red and the black. I will try to zip-tie some of the accessible wires closer together, test again and do a new current calibration.
My GPS module houses its own magnetometer that I didn't connect so far. If everything fails I could switch to the external magnetometer. Not sure how to deactivate the internal one, though.
Thanks so far,
Simon
Am 24.07.2015 um 12:23 schrieb Loic Drumettaz:
LoïcRegardsThen the the current calibration can be performed to compensate the remaining induced current magnetic field.- Move the magnetometer away from the power wires- Twisting power wires and fasted them to the structure (this avoid loops between plus and minus wires that generates the magnetic field)Hello,The magnetic field induced by current can be effectivelly reduced by:
2015-07-24 11:30 GMT+02:00 Ewoud Smeur <address@hidden>:
Hi Simon,
I flew with a hexacopter which would get a psi error of 30 degrees due to the currents, so I guess 80 degrees is also possible. It just depends on the ammount of current, orientation of the wires, etc.
Looking at your plot where you flew without this calibration, I would say this is indeed the problem. The estimation is constant, until you take-off (and currents start running). Then it gradually gets the 80 degree offset, after which it becomes stable. When you land (and currents are gone), it goes back to the initial psi estimate. Looking at your video the real heading is constant.
Seems clear to me.
Regards,
Ewoud
From: address@hidden
Date: Thu, 23 Jul 2015 16:17:24 -0600
To: address@hidden
Subject: Re: [Paparazzi-devel] Copter isn't holding its position in hover (H_ZH) mode - with video!
Hi,
I remember reporting a very similar issue with different hardware (an AR Drone) and the problem never get resolved, even after calibration and replacing the IMU.
On Thu, Jul 23, 2015 at 2:20 PM, Sergey Krukowski <address@hidden> wrote:
Hi Simon!
I think the offset of 60° is not normal, even with wrong calibration.
Did you mount the board correctly? Try to check your board placing according this:
Thus in the northern hemisphere:
When you align your IMU with the direction of north, you should see x>0, y=0, z>0.
When pitching the IMU down, the magnetic vector is aligning with x, so x should increase and z should decrease to zero.
If yawing your IMU to the left, the magnetic vector is aligning with y, so y should be positive, x should decrease to zero and z stay positive.
And in the southern hemisphere:
When you align your IMU with the direction of north, you should see x>0, y=0, z<0
When pitching the IMU up, the magnetic vector is aligning with x, so x should increase and z should increase towards zero.
If yawing your IMU to the left, the magnetic vector is aligning with y, so y should be positive, x should decrease to zero and z stay negative.
But this is correct only in case of BODY_TO_IMU angles are close or equal zero.
Best regards,
Sergey
Hi Ewoud, Felix,
Yes, I took the previous current calibration completely out of the
airframe file for the last test, to see the effect most clearly. It did
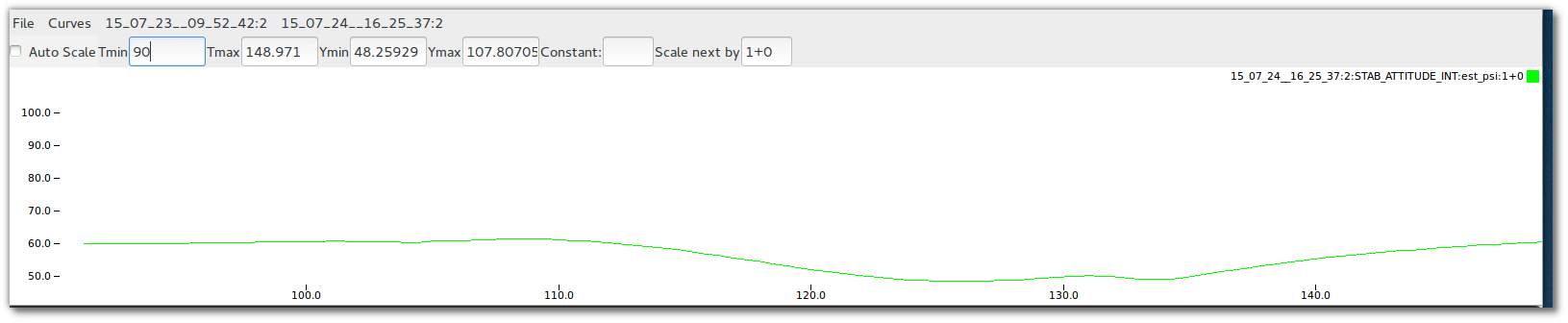
drift a lot (around 80°!).
The "real" direction in the screenshot above is around -60° the whole
time. But as the copter keeps turning clockwise, I had to yaw left (the
down steps of the green line).
While replaying the flight, the GCS shows the copter pointing almost
south while in reality it was still pointing roughly 300°. See the two
walking paths marked in yellow and red and compare it with the video.
As the next step I will do another current calibration and compare it
with my earlier values. Though, my question is: Without any current
calibration (like in the test above), do you get to see an psi offset of
as much as 80-90°? This sounds a bit too much. Will a better current
calibration help here or am I better off rewiring the power cables
all-together?
The full video: https://youtu.be/F1WrH9zZjNs
In the video I am engaging hover mode three times. The last one @1:57 is
quite dramatic.
Simon
Am 23.07.2015 um 18:33 schrieb Ewoud Smeur:
Hi Simon,
Maybe your magnetometer picks up the magnetic field induced by the
current through the wires. You can calibrate for that:
http://wiki.paparazziuav.org/wiki/ImuCalibration
See the section 'Calibrating for current'
Ewoud
------------------------------------------------------------------------
Date: Thu, 23 Jul 2015 15:54:22 +0200
From: address@hidden
To: address@hidden
Subject: Re: [Paparazzi-devel] Copter isn't holding its position in
hover (H_ZH) mode - with video!
Hi Felix,
I did another test earlier today. This time with more extensive
logging and again with video. The psi value seems to be off to the
left (ccw) during flight (not on the ground, though). But I am still
evaluating the data and comparing it with the video. Another post on
Youtube is to come once I am done synchronizing the screen cast of the
replay with the on-board recording from the GoPro.
Sim
Am 23.07.2015 um 15:09 schrieb Felix Ruess:
Hi Simon,
any updates here?
Did you also test if the heading (psi value) stays the
same/correct if you start rolling/pitching the quad?
Cheers, Felix
On Fri, Jul 17, 2015 at 9:41 PM, Simon Liebold
<address@hidden <mailto:address@hidden>> wrote:
Hi Gautier,
A wrong heading estimate would explain it. But during a bench
test right now the pointer on the GCS (and the value of int32
psi) agree with the heading of my phone's magnetometer.
In the next few days I will test if the psi value changes when
I ramp up the throttle. I did a current calibration. But maybe
not correctly.
I will keep you posted.
--
Erstellt mit Operas revolutionärem E-Mail-Modul: http://www.opera.com/mail/
_______________________________________________
Paparazzi-devel mailing list
address@hidden
https://lists.nongnu.org/mailman/listinfo/paparazzi-devel
_______________________________________________ Paparazzi-devel mailing list address@hidden https://lists.nongnu.org/mailman/listinfo/paparazzi-devel
_______________________________________________
Paparazzi-devel mailing list
address@hidden
https://lists.nongnu.org/mailman/listinfo/paparazzi-devel
_______________________________________________ Paparazzi-devel mailing list address@hidden https://lists.nongnu.org/mailman/listinfo/paparazzi-devel
_______________________________________________ Paparazzi-devel mailing list address@hidden https://lists.nongnu.org/mailman/listinfo/paparazzi-devel