can you calculate the bias in °/s?
I have found that a bias in the range of 0.5-2°/s is normal.
If the bias brake this border change the sensor element.
regards
Heinrich
Bruzzlee schrieb:
Hello paparazzi community
After 8h of trying to get rid of my drift on phi you are my last hope.
Every hint is useful!
I think it has something to do with the AHRS.
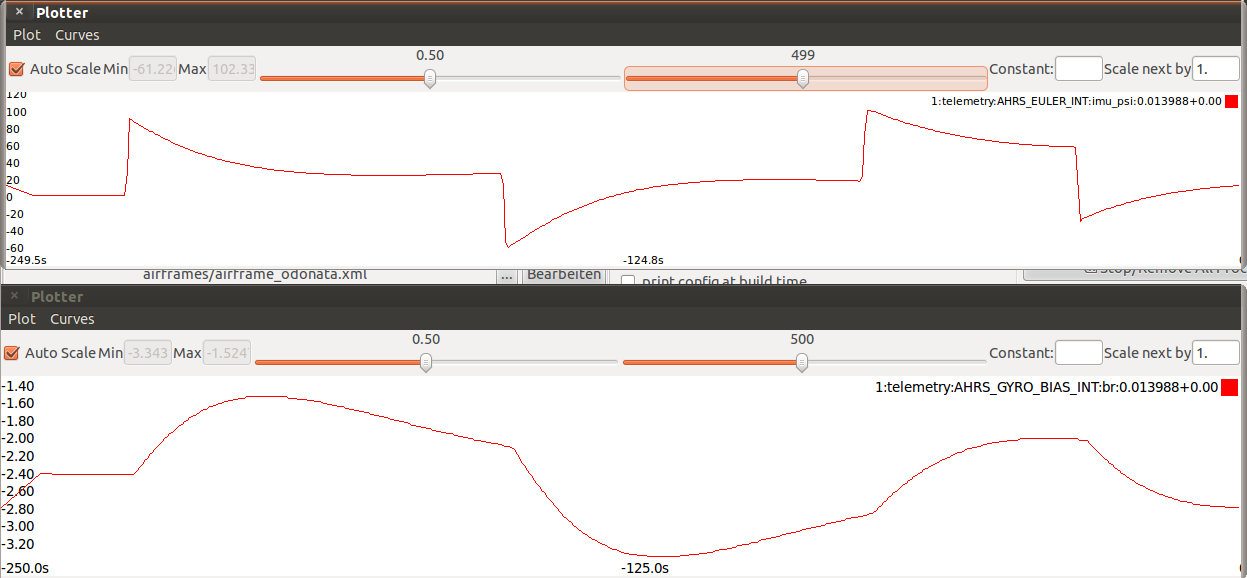
Compensation of psi drift with MAG
The plot shows a fast 90° turn clockwise and back again.
In the lower plot you also can that the bias changes a lot, is that "normal"?
Lisa M 1.0 + Aspirin IMU 1.5
(I did the calibration of Accel and mag a few time with similar results)
Thx for any hint!
Bruzzlee
<airframe name="Odonata_LisaM"> <firmware name="rotorcraft"> <target name="ap" board="lisa_m_1.0"> <subsystem name="radio_control" type="spektrum"> <!--define name="RADIO_CONTROL_SPEKTRUM_SIGNS" value="\{1,1,-1,1,-1,-1\}"/--> <define name="RADIO_MODE" value="RADIO_GEAR"/> <define name="RADIO_KILL_SWITCH" value="RADIO_AUX1"/> <configure name="USE_SECONDARY_SPEKTRUM_RECEIVER" value="0"/> <configure name="USE_KILL_SWITCH_FOR_MOTOR_ARMING" value="1"/> <!--configure name="AUTOPILOT_DISABLE_AHRS_KILL" value="0"/--> </subsystem> </target> <target name="nps" board="pc"> <subsystem name="fdm" type="jsbsim"/> <subsystem name="radio_control" type="ppm"/> </target> <subsystem name="motor_mixing"/> <subsystem name="actuators" type="pwm"> <define name="SERVO_HZ" value="400"/> <!--define name="USE_SERVOS_7AND8"/--> </subsystem> <subsystem name="telemetry" type="transparent"/> <configure name="MODEM_BAUD" value="B9600"/> <subsystem name="imu" type="aspirin_v1.5"/> <subsystem name="gps" type="ublox"/> <subsystem name="stabilization" type="int_quat"/> <subsystem name="ahrs" type="int_cmpl_quat"/> <subsystem name="ins"/> <!--define name="USE_INS_NAV_INIT"/--> <!--subsystem name="stabilization" type="int_euler"/> <subsystem name="ahrs" type="int_cmpl_euler"/--> </firmware> <firmware name="lisa_test_progs"> <target name="test_led" board="lisa_m_1.0"> <configure name="SYS_TIME_LED" value="none"/> </target> <target name="test_uart" board="lisa_m_1.0"/> <target name="test_imu_aspirin" board="lisa_m_1.0"/> <target name="test_rc_spektrum" board="lisa_m_1.0"/> <target name="test_baro" board="lisa_m_1.0"/> </firmware> <servos driver="Pwm"> <servo name="FRONT" no="0" min="1000" neutral="1100" max="1900"/> <servo name="BACK" no="1" min="1000" neutral="1100" max="1900"/> <servo name="RIGHT" no="2" min="1000" neutral="1100" max="1900"/> <servo name="LEFT" no="3" min="1000" neutral="1100" max="1900"/> </servos> <commands> <axis name="ROLL" failsafe_value="0"/> <axis name="PITCH" failsafe_value="0"/> <axis name="YAW" failsafe_value="0"/> <axis name="THRUST" failsafe_value="0"/> </commands> <command_laws> <call fun="motor_mixing_run(autopilot_motors_on,FALSE,values)"/> <set servo="FRONT" value="motor_mixing.commands[SERVO_FRONT]"/> <set servo="BACK" value="motor_mixing.commands[SERVO_BACK]"/> <set servo="RIGHT" value="motor_mixing.commands[SERVO_RIGHT]"/> <set servo="LEFT" value="motor_mixing.commands[SERVO_LEFT]"/> </command_laws> <section name="MIXING" prefix="MOTOR_MIXING_"> <define name="STOP_MOTOR" value="0"/> <define name="TRIM_ROLL" value="0"/> <define name="TRIM_PITCH" value="0"/> <define name="TRIM_YAW" value="0"/> <define name="NB_MOTOR" value="4"/> <define name="SCALE" value="256"/> <!--define name="ROLL_COEF" value="{ 0, -256, 0, 256 }"/> <define name="PITCH_COEF" value="{ 256, 0, -256, 0 }"/> <define name="YAW_COEF" value="{ -256, 256, -256, 256 }"/> <define name="THRUST_COEF" value="{ 256, 256, 256, 256 }"/--> <define name="ROLL_COEF" value="{ 0 , 0, -256, 256 }"/> <define name="PITCH_COEF" value="{ 256, -256, 0, 0 }"/> <define name="YAW_COEF" value="{ 256, 256, -256, -256 }"/> <define name="THRUST_COEF" value="{ 256, 256, 256, 256 }"/> </section> <section name="IMU" prefix="IMU_"> <!--define name="GYRO_P_NEUTRAL" value="-60"/> <define name="GYRO_Q_NEUTRAL" value="1"/> <define name="GYRO_R_NEUTRAL" value="-40"/--> <!--define name="GYRO_P_SENS" value="4.359" integer="16"/> <define name="GYRO_Q_SENS" value="4.359" integer="16"/> <define name="GYRO_R_SENS" value="4.359" integer="16"/--> <!--define name="GYRO_P_SENS" value="4.967" integer="16"/> <define name="GYRO_Q_SENS" value="4.967" integer="16"/> <define name="GYRO_R_SENS" value="8.967" integer="16"/> <define name="GYRO_PQ_SENS" value="0.0" integer="16"/> <define name="GYRO_PR_SENS" value="0.0" integer="16"/> <define name="GYRO_QR_SENS" value="0.0" integer="16"/--> <define name="ACCEL_X_NEUTRAL" value="2"/> <define name="ACCEL_Y_NEUTRAL" value="-2"/> <define name="ACCEL_Z_NEUTRAL" value="-18"/> <define name="ACCEL_X_SENS" value="38.364291532" integer="16"/> <define name="ACCEL_Y_SENS" value="37.412848171" integer="16"/> <define name="ACCEL_Z_SENS" value="39.5532801506" integer="16"/> <!--define name="ACCEL_XY_SENS" value="0.0" integer="16"/> <define name="ACCEL_XZ_SENS" value="0.0" integer="16"/> <define name="ACCEL_YZ_SENS" value="0.0" integer="16"/--> <define name="MAG_X_NEUTRAL" value="-101"/> <define name="MAG_Y_NEUTRAL" value="32"/> <define name="MAG_Z_NEUTRAL" value="-42"/> <define name="MAG_X_SENS" value="4.04547589416" integer="16"/> <define name="MAG_Y_SENS" value="4.57546806101" integer="16"/> <define name="MAG_Z_SENS" value="4.01214304094" integer="16"/> <!--define name="MAG_XY_SENS" value="0.0" integer="16"/> <define name="MAG_XZ_SENS" value="0.0" integer="16"/> <define name="MAG_YZ_SENS" value="0.0" integer="16"/--> <define name="BODY_TO_IMU_PHI" value="0." unit="deg"/> <define name="BODY_TO_IMU_THETA" value="0." unit="deg"/> <define name="BODY_TO_IMU_PSI" value="90." unit="deg"/> </section> <section name="AUTOPILOT"> <define name="MODE_MANUAL" value="AP_MODE_ATTITUDE_DIRECT"/> <define name="MODE_AUTO1" value="AP_MODE_ATTITUDE_Z_HOLD"/> <define name="MODE_AUTO2" value="AP_MODE_HOVER_Z_HOLD"/> </section> <section name="BAT"> <define name="CATASTROPHIC_BAT_LEVEL" value="9.3" unit="V"/> </section> <section name="STABILIZATION_RATE" prefix="STABILIZATION_RATE_"> <!-- setpoints --> <define name="SP_MAX_P" value="10000"/> <define name="SP_MAX_Q" value="10000"/> <define name="SP_MAX_R" value="10000"/> <define name="DEADBAND_P" value="20"/> <define name="DEADBAND_Q" value="20"/> <define name="DEADBAND_R" value="200"/> <define name="REF_TAU" value="4"/> <!-- feedback --> <define name="GAIN_P" value="400"/> <define name="GAIN_Q" value="400"/> <define name="GAIN_R" value="350"/> <define name="IGAIN_P" value="75"/> <define name="IGAIN_Q" value="75"/> <define name="IGAIN_R" value="50"/> <!-- feedforward --> <define name="DDGAIN_P" value="300"/> <define name="DDGAIN_Q" value="300"/> <define name="DDGAIN_R" value="300"/> </section> <section name="STABILIZATION_ATTITUDE" prefix="STABILIZATION_ATTITUDE_"> <!-- setpoints --> <define name="SP_MAX_PHI" value="45." unit="deg"/> <define name="SP_MAX_THETA" value="45." unit="deg"/> <define name="SP_MAX_PSI" value="45." unit="deg"/> <define name="SP_MAX_R" value="90." unit="deg/s"/> <define name="SP_MAX_P" value="90." unit="deg/s"/> <define name="DEADBAND_E" value="0"/> <define name="DEADBAND_A" value="250"/> <define name="DEADBAND_R" value="250"/> <!-- reference --> <define name="REF_OMEGA_P" value="800" unit="deg/s"/> <define name="REF_ZETA_P" value="0.85"/> <define name="REF_MAX_P" value="400." unit="deg/s"/> <define name="REF_MAX_PDOT" value="RadOfDeg(8000.)"/> <define name="REF_OMEGA_Q" value="800" unit="deg/s"/> <define name="REF_ZETA_Q" value="0.85"/> <define name="REF_MAX_Q" value="400." unit="deg/s"/> <define name="REF_MAX_QDOT" value="RadOfDeg(8000.)"/> <define name="REF_OMEGA_R" value="500" unit="deg/s"/> <define name="REF_ZETA_R" value="0.85"/> <define name="REF_MAX_R" value="180." unit="deg/s"/> <define name="REF_MAX_RDOT" value="RadOfDeg(1800.)"/> <!-- feedback --> <define name="PHI_PGAIN" value="750"/> <define name="PHI_DGAIN" value="500"/> <define name="PHI_IGAIN" value="100"/> <define name="THETA_PGAIN" value="750"/> <define name="THETA_DGAIN" value="500"/> <define name="THETA_IGAIN" value="100"/> <define name="PSI_PGAIN" value="1500"/> <define name="PSI_DGAIN" value="1000"/> <define name="PSI_IGAIN" value="10"/> <!-- feedforward --> <define name="PHI_DDGAIN" value=" 150"/> <define name="THETA_DDGAIN" value=" 150"/> <define name="PSI_DDGAIN" value=" 300"/> </section> <section name="INS" prefix="INS_"> </section> <section name="GUIDANCE_V" prefix="GUIDANCE_V_"> <define name="MIN_ERR_Z" value="POS_BFP_OF_REAL(-10.)"/> <define name="MAX_ERR_Z" value="POS_BFP_OF_REAL( 10.)"/> <define name="MIN_ERR_ZD" value="SPEED_BFP_OF_REAL(-10.)"/> <define name="MAX_ERR_ZD" value="SPEED_BFP_OF_REAL( 10.)"/> <define name="MAX_SUM_ERR" value="2000000"/> <define name="HOVER_KP" value="400"/> <define name="HOVER_KD" value="350"/> <define name="HOVER_KI" value="144"/> <define name="GUIDANCE_V_NOMINAL_HOVER_THROTTLE" value ="0.9"/> </section> <section name="AHRS" prefix="AHRS_"> <define name="H_X" value=" 0.03075352"/> <define name="H_Y" value=" 0.99765715"/> <define name="H_Z" value=" 0.06111"/> <!--define name="H_X" value=" 0.460452"/> <define name="H_Y" value=" 0.0031046"/> <define name="H_Z" value=" 0.8876792"/--> </section> <section name="GUIDANCE_H" prefix="GUIDANCE_H_"> <define name="PGAIN" value="50"/> <define name="DGAIN" value="50"/> <define name="IGAIN" value="0"/> </section> <section name="MISC"> <define name="FACE_REINJ_1" value="1024"/> </section> <section name="SIMULATOR" prefix="NPS_"> <define name="ACTUATOR_NAMES" value="{"front_motor", "back_motor", "right_motor", "left_motor"}"/> <define name="JSBSIM_INIT" value=""reset00""/> <define name="SENSORS_PARAMS" value=""nps_sensors_params_booz2_a1.h""/> <!-- mode switch on joystick channel 5 (axis numbering starting at zero) --> <define name="JS_AXIS_MODE" value="4"/> </section> <!--modules main_freq="512"> <!--load name="vehicle_interface_overo_link.xml"/-> <load name="gps_ubx_ucenter.xml"/> </modules--> </airframe>
_______________________________________________ Paparazzi-devel mailing list address@hidden https://lists.nongnu.org/mailman/listinfo/paparazzi-devel