[Top][All Lists]
[Date Prev][Date Next][Thread Prev][Thread Next][Date Index][Thread Index]
Re: [Paparazzi-devel] IMU calibration
|
From: |
David Conger |
|
Subject: |
Re: [Paparazzi-devel] IMU calibration |
|
Date: |
Tue, 26 Jul 2011 12:36:41 -0700 |
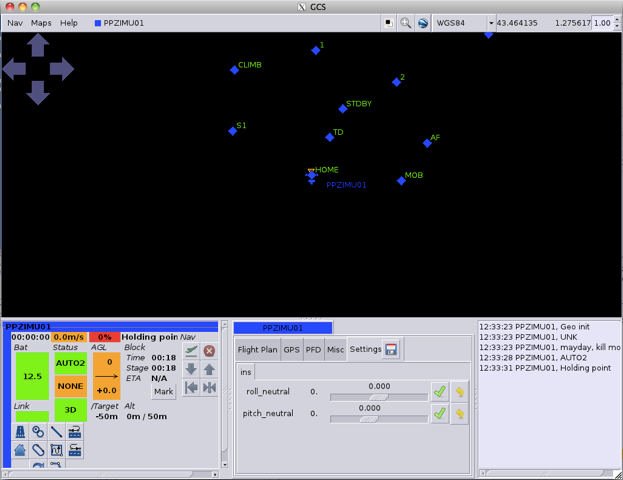
I must be slower than most. My "settings" tool only shows two options: roll
neutral and pitch neutral.
Now with Booz there was a special settings file that gave me extra options in
the same "Settings" tab. However, I'm not sure how to create a special settings
XML file to enable this or if one exists I should just use instead of the
"ins_basic.xml" one. These are the details I imagine I'm not the only one who
would benefit from having documented.
If someone shares with me as I have done in the past I will post it to the
WIki.
Regards,
David
On Jul 26, 2011, at 11:16 AM, Piotr Esden-Tempski wrote:
> Hi David,
>
> You can change that in the settings tool. GCS has a tab for that and there is
> a stand alone agent for this too.
>
> Cheers Esden
>
> On Jul 26, 2011, at 10:29 AM, David Conger wrote:
>
>> Hello Paparazzi world,
>>
>> I'm wanting to follow the Wiki for IMU Calibration and am not understanding
>> the first step: "Switch to the "raw sensors" telemetry mode and launch
>> "server" to record a log.
>>
>> I don't see where to enable "raw sensors" telemetry mode in GCS or Paparazzi
>> Center. Can someone update the Wiki to be a little more specific how this is
>> done to enable "raw sensors" ?
>>
>> -David
>> _______________________________________________
>> Paparazzi-devel mailing list
>> address@hidden
>> https://lists.nongnu.org/mailman/listinfo/paparazzi-devel
>
>
> _______________________________________________
> Paparazzi-devel mailing list
> address@hidden
> https://lists.nongnu.org/mailman/listinfo/paparazzi-devel