[Top][All Lists]
[Date Prev][Date Next][Thread Prev][Thread Next][Date Index][Thread Index]
[Paparazzi-devel] paparazzi with 6dof imu+compass+pitot+baroaltimeter on
|
From: |
Jose Luis Cortes |
|
Subject: |
[Paparazzi-devel] paparazzi with 6dof imu+compass+pitot+baroaltimeter on board? |
|
Date: |
Wed, 2 Jul 2008 18:48:48 +0200 |
Hi to all!
I have start to design a board (only to spend sunday afternoom) based
on tiny 2 protel, i am thinking about a small PCB with all common uav
sensors.
it is only an idea, but i am willing to build a project like this.
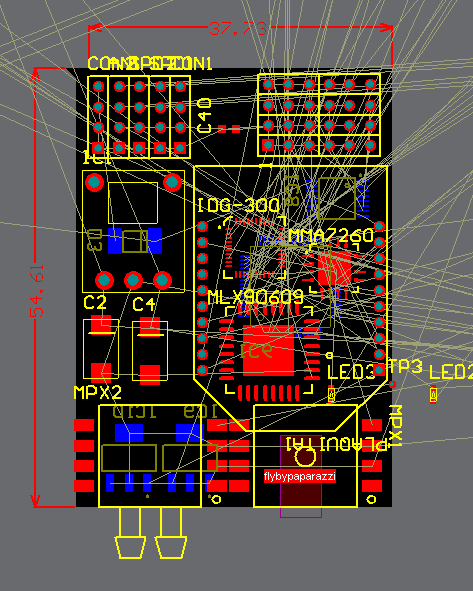
the board could be about 40 x 55 mm with next components:
- all tiny components excepting GPS (i preffer to use a GPS module to
more flexible placement)
- inertial sensors for 6DOF (without any vertical board!!!
MMA7260Q+IDG-300+MLX90609)
- Absolute pressure (altitude) - MPX4100A
- Diferential pressure (pitot-tube) - MPXV5010DP
- Xbee Pro (100mw)
- 2 axis compass MH55B
- 1 x GPS (uart) input for a external any nmea gps
...
my IMU proposal is very compact and have no vertical boards, i have
allready tested it - this small board have a interesting combination
of inertial sensor to complete 6DOF in order to avoid vertical boards:
Acelerometer (X,Y,Z) - MMA7260Q (analog output) or LIS3LV02DQ (SPI output)
Gyros (X,Y) - IDG-300 (3 gyros in the same chip analog output)
Gyro (Z) - MLX90609 (analog and SPI output)
I attach a screenshot with a very very preview of this board.
Jlcortex
 flybypaparazzi.png
flybypaparazzi.png
Description: PNG image
- [Paparazzi-devel] paparazzi with 6dof imu+compass+pitot+baroaltimeter on board?,
Jose Luis Cortes <=
{kind=link}